A aplicação de motores de indução alimentados por conversores de frequência
Redação
Um motor de indução alimentado por conversor de frequência é acionado por um conversor de frequência independentemente de ter sido projetado especialmente para esse tipo de aplicação ou de ter sido originalmente projetado para operação com alimentação senoidal. Um motor de rotação fixa é projetado para operação com tensão senoidal (partida direta) e com frequência nominal típica de 50 Hz e/ou 60 Hz. É um motor dentro do escopo da NBR 17094-1. Os motores de rotação fixa podem ser capazes de operar com conversor de frequência com variação de rotação. conversor de frequência equipamento para conversão eletrônica de potência, alterando uma ou mais características elétricas e incluindo um ou mais componentes de chaveamento eletrônico e componentes associados, como os transformadores, filtros, comutadores auxiliares, controles, proteções, etc. O conhecimento do circuito equivalente do motor elétrico normalmente não é importante para o projeto do conversor de frequência, mas as impedâncias harmônicas do motor influenciam nas perdas causadas pelos harmônicos. A tensão que o conversor de frequência fornece ao motor sintetiza uma onda senoidal usando pulsos quase retangulares com frentes de onda rápidas e amplitude aproximadamente constante (igual à amplitude do barramento cc). Além das perdas bem conhecidas devidas às tensões e correntes fundamentais, a característica não senoidal da tensão fornecida pelo conversor de frequência ocasiona perdas adicionais no motor. Estas perdas adicionais dependem da rotação, tensão, corrente, forma de onda da tensão de saída do conversor de frequência, projeto e tamanho do motor. Se nenhuma indutância ou filtro for utilizado, estas perdas podem representar de 10% a 30% das perdas fundamentais, o que equivale de 1%. a 2% da potência nominal do motor no caso de conversores de frequência de dois níveis. No caso de conversores de frequência de três níveis, as perdas adicionais causadas pelo conversor de frequência são menores, variando tipicamente de 0,2% a 1% da potência nominal do motor. Este efeito tende a diminuir com o aumento da potência do motor. A amplitude e o comportamento característico das perdas adicionais causadas pelo conversor de frequência dependem do projeto do motor, das características do conversor de frequência e do uso de filtros. Deve-se entender os parâmetros de desempenho para motores de indução de baixa tensão (= 1.000 V) alimentados por conversores de frequência PWM tipo fonte de tensão e as características de projeto para motores especificamente projetados para aplicações com conversor de frequência. Também deve-se entender os parâmetros de interface e interação entre o motor e o conversor de frequência, incluindo boas práticas de instalação como parte do sistema de acionamento.
Os benefícios mais significativos da alimentação por conversor de frequência são obtidos pela otimização do fluxo do motor dependendo da carga (por exemplo, redução do fluxo na operação com carga parcial), pois isso reduz as perdas fundamentais, que são consideravelmente maiores do que as perdas adicionais. A otimização de fluxo é frequentemente usada em acionamentos de bombas e ventiladores, nos quais a demanda de conjugado é proporcional ao quadrado da rotação. Em rotações mais baixas, o conjugado necessário é sensivelmente reduzido, podendo ser desenvolvido com menor fluxo e, consequentemente, menores perdas no motor.
O mesmo princípio é usado para o controle do fator de potência, em aplicações em que o conjugado da carga (não necessariamente a rotação) varia, ajustando-se o fluxo do motor de acordo com a necessidade, de modo que o fator de potência do motor permaneça no valor ótimo. Na maioria dos processos, a carga acionada varia conforme a rotação de operação. Os seguintes termos descrevem a característica da carga: carga de conjugado variável, carga de conjugado constante, carga de potência constante.
Para uma correta aplicação de motor com conversor de frequência, é importante determinar como a carga varia em relação à frequência ou rotação de operação. Cargas de conjugado variável são boas candidatas às aplicações com uso de conversor de frequência. Exemplos típicos destas cargas são: bomba centrífuga, ventiladores, exaustores e compressores centrífugos.
O conjugado varia proporcionalmente com o quadrado da rotação, e a potência varia com o cubo da rotação, atingindo 100% de conjugado e de potência em uma determinada rotação, comumente chamada de rotação-base. O conjugado varia linearmente com a rotação, e a potência varia com o quadrado da rotação, atingindo 100% de conjugado e de potência em uma determinada rotação comumente chamada de rotação-base. O conjugado da carga se mantém constante em toda a faixa de operação.
A potência varia linearmente com a rotação para estas cargas. Transportadores, brocas, bombas volumétricas, extrusoras, trituradores, compressores de parafuso, compressores alternativos e moinhos de bola são exemplos de cargas de conjugado constante. Cargas de alto impacto e cargas com ciclo de trabalho tipicamente se enquadram na classificação de conjugado constante. Um ciclo de trabalho consiste em cargas discretas aplicadas por períodos definidos de tempo e repetidos periodicamente. As cargas discretas podem ser aplicadas com rotação variável ou constante. Uma definição típica de ciclo de trabalho consiste em um gráfico de carga versus tempo.
Em cargas de alto impacto, o conjugado é aplicado intermitentemente sem variação em função da rotação. Cargas de impacto são exemplificadas por prensas, que utilizam um grande volante que fornece a energia necessária para a carga. O conjugado da carga diminui à medida que a rotação aumenta, resultando em um valor constante de potência em toda a faixa de operação. Bobinadeiras e máquinas de usinagem são exemplos de cargas de potência constante.
A NBR 16881 de 09/2020 - Motores de indução alimentados por conversores de frequência — Parâmetros de desempenho e critérios de aplicação fornece parâmetros de desempenho para motores de indução de baixa tensão (= 1.000 V) alimentados por conversores de frequência PWM tipo fonte de tensão e as características de projeto para motores especificamente projetados para aplicações com conversor de frequência. Também são especificados parâmetros de interface e interação entre o motor e o conversor de frequência, incluindo boas práticas de instalação como parte do sistema de acionamento.
Esta norma é aplicável tanto a motores especificamente projetados para uso com o conversor de frequência quanto a motores projetados para partida direta (alimentação senoidal) alimentados por conversor de frequência. Para motores que operam em atmosferas explosivas, devem ser observados os requisitos especificados na NBR IEC 60079-0. Quando o fabricante do conversor de frequência fornecer recomendações específicas para a instalação do sistema de acionamento, estas prevalecem sobre as recomendações desta norma.
O desempenho e os dados de operação de motores de indução alimentados por conversores de frequência são influenciados por todo o sistema de acionamento, incluindo a fonte de alimentação, o conversor de frequência, os cabos elétricos, o motor, a carga acionada e o equipamento de controle. Existem inúmeras variações para cada um destes componentes. Assim, quaisquer valores mencionados nesta norma são meramente indicativos.
O conversor de frequência e seu funcionamento criam três seguintes variáveis que afetam diretamente o ruído emitido. As mudanças na rotação, que podem variar de uma rotação próxima de zero a valores que excedam o ponto de início de enfraquecimento de campo. Os componentes e fatores que influenciam as emissões de ruído são rolamentos e lubrificação, ventilação e quaisquer outras características que são afetadas por mudanças de temperatura.
A frequência da fonte de alimentação do motor elétrico e conteúdo harmônico que têm um grande efeito sobre o ruído magnético excitado no núcleo do estator e, em menor grau, sobre o ruído do rolamento. As excitações radiais e torsionais do núcleo do estator devido à interação de ondas de diferentes frequências do campo magnético no entreferro do motor elétrico. Em face das complexas interações técnicas existentes entre os componentes do sistema de acionamento e das possíveis variações das condições de operação, está além do escopo desta norma especificar valores ou limites numéricos para todas as grandezas relevantes para o projeto do sistema de acionamento. Cada vez mais é comum que o sistema de acionamento seja constituído por equipamentos e componentes produzidos por diferentes fabricantes.
O objetivo desta norma é explicar, tanto quanto possível, a influência destes componentes no projeto do motor e nas suas características de desempenho. Esta norma, a princípio, não enfoca questões relacionadas à segurança. No entanto, algumas recomendações contidas no documento podem ter implicações no aspecto da segurança. Embora as etapas de especificação das características do motor e do conversor de frequência sejam semelhantes para qualquer aplicação, a escolha dos equipamentos mais apropriados a cada caso é muito influenciada pelo tipo de aplicação.
A seguir são descritas as etapas de seleção dos equipamentos constituintes do PDS. Por conveniência, os efeitos dos diferentes tipos de carga acionada existentes são discutidos no Anexo A. A informação completa de uma aplicação considera a carga acionada, o motor elétrico, o conversor de frequência e a rede elétrica. O conhecimento de todas essas informações é fundamental para que o desempenho requerido de todo o sistema seja alcançado.
Os dados requeridos incluem: a faixa de operação; a potência ou o conjugado requerido em toda a faixa de operação; as taxas de aceleração e desaceleração do processo que está sendo controlado; os requisitos de partida incluindo o número (frequência) de partidas e a descrição da carga (a inércia vista do eixo do motor e o conjugado da carga durante a partida); ciclo de trabalho da aplicação; a descrição das funcionalidades adicionais que não podem ser satisfeitas somente com o motor elétrico e conversor de frequência (por exemplo: monitoramento da temperatura do motor elétrico, dispositivos para permitir a partida direta (bypass), se necessário, circuitos especiais de sequenciamento ou sinais de referência de velocidade para controlar o PDS, etc.); a descrição da fonte de alimentação elétrica disponível e do tipo de ligação.
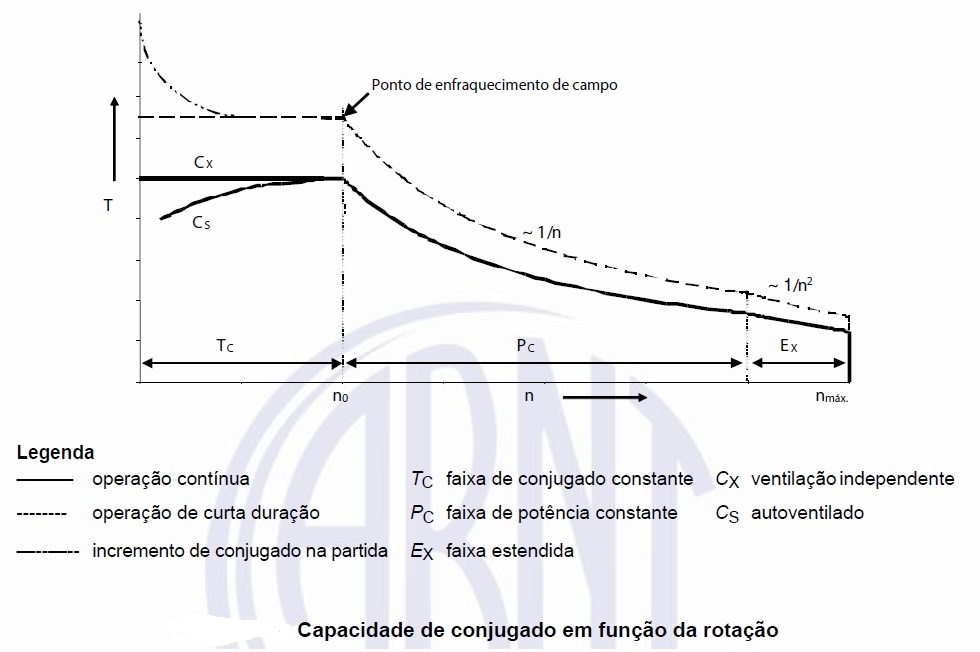
As figuras abaixo resumem as características típicas do comportamento de um motor alimentado por conversor de frequência. Elas não mostram possíveis faixas evitadas. A figura abaixo mostra a curva de conjugado versus rotação de um motor alimentado por conversor de frequência. O conjugado máximo permitido é limitado pela característica do motor e pela corrente do conversor de frequência. Acima da frequência de enfraquecimento de campo f0 e da rotação n0, o motor pode operar com potência constante com um valor proporcional de 1/n. Se o valor de conjugado máximo (que é proporcional à 1/n2) atingir o valor de conjugado nominal, a potência tem de ser reduzida proporcionalmente a 1/n resultando em um conjugado proporcional a 1/n2 (faixa estendida).
A rotação máxima utilizável (nmáx.) é limitada não apenas pela redução de conjugado devido ao enfraquecimento do campo em rotações superiores a n0, mas também pela rigidez e estabilidade mecânica do rotor, pela capacidade de rotação dos mancais e por outros parâmetros mecânicos. Em baixas frequências, o conjugado disponível pode ser reduzido em motores autoventilados a fim de se evitar sobreaquecimento. Em algumas aplicações, é possível aplicar um incremento de conjugado na partida.
A figura abaixo mostra a capacidade de corrente de saída (I) do conversor de frequência.

Conforme indicado na figura acima, o tipo de resfriamento influencia a capacidade máxima de conjugado versus rotação do PDS. Motores elétricos com potência na faixa de megawatts muitas vezes têm um sistema de resfriamento composto por um circuito de resfriamento primário (geralmente tendo ar como refrigerante primário) e um circuito de resfriamento secundário (tendo ar ou água como refrigerante secundário). As perdas são transferidas do circuito primário para o secundário por meio de um trocador de calor.
Quando os fluidos refrigerantes primário e secundário são movidos por um dispositivo separado, tornando o seu fluxo independente da rotação do motor (por exemplo, IC656 conforme a NBR IEC 60034-6), a curva da figura acima para ventilação separada é aplicável. Quando o fluido refrigerante secundário é movido por um dispositivo separado e o fluido refrigerante primário é movido por um dispositivo acionado pelo eixo (por exemplo, IC81W ou IC616), a curva da figura para autorresfriamento é aplicável.
Quando os fluidos refrigerantes primário e secundário são movidos por um dispositivo acionado pelo próprio eixo do motor elétrico, o conjugado de saída não deve exceder a curva T/TN = n2/n02 e recomenda-se que a mínima rotação de operação seja = 70 % da rotação nominal. Para aplicações que excedam esta faixa, o fabricante do motor deve ser consultado.
A faixa de operação de um motor alimentado por conversor de frequência pode incluir rotações que podem excitar ressonâncias em partes do estator, no eixo, no sistema de acoplamento do motor com a carga acionada, ou na própria carga acionada. Dependendo do conversor de frequência, pode ser possível evitar as frequências ressonantes. No entanto, mesmo que as frequências ressonantes sejam evitadas, a carga é acelerada através dela, caso o motor seja operado em qualquer rotação acima da rotação de ressonância.
Diminuir o tempo de aceleração pode ajudar a minimizar o intervalo de tempo em que se opera na rotação de ressonância. A faixa de operação deve ser acordada com o fabricante do motor e da máquina acionada. Como motores aplicados com conversor de frequência costumam trabalhar em uma faixa de operação e não apenas em um ponto de operação fixo, normalmente não se aplica o conceito de condição nominal de operação para esses motores.
O ponto-base de operação do motor alimentado por conversor de frequência geralmente é considerado o ponto em que o motor entrega o máximo conjugado e a máxima potência. Neste ponto, o motor opera com rotação-base, tensão-base, corrente-base, conjugado-base e potência-base, correspondendo ao ponto da figura acima em que n = n0. A máxima rotação de operação pode ser maior do que a rotação-base e, dependendo das características de tensão e frequência, a máxima tensão de operação pode exceder a tensão-base.
Para um motor elétrico operado por conversor de frequência, o fabricante deve informar os limites de rotação para operação segura nos dados de placa. Para motores de indução de gaiola de baixa tensão com partida direta, o limite de rotação para operação segura deve ser definido de acordo com a NBR 17094-1. Os critérios de sobrevelocidade para motores são especificados na NBR 17094-1, mas os ensaios de sobrevelocidade não são normalmente considerados necessários.
Os ensaios especiais, porém, podem ser realizados mediante acordo, para que se verifique a integridade do projeto do rotor em relação às forças centrífugas. Para motores alimentados por conversor de frequência, uma aceleração até uma rotação maior de que a máxima rotação de operação determinada pelo controle do conversor de frequência é improvável. Especialmente para motores grandes, geralmente é benéfico projetar o motor para uma rotação limite de 1,05 vez a rotação máxima de operação. Ensaios também podem ser realizados a 1,05 vez a rotação máxima de operação.
Deve-se considerar que, para operação em alta rotação, um balanceamento fino do rotor pode ser necessário. No caso de operação nesta condição por longos períodos, a vida dos rolamentos pode ser reduzida, requerendo redução do intervalo de relubrificação. As aplicações com regimes cíclicos são aquelas nas quais existem variações periódicas ou intermitentes de rotação e/ou carga (ver NBR 17094-1).
Vários aspectos deste tipo de aplicação afetam o motor e o conversor de frequência, como a dissipação térmica do motor é variável, dependendo da rotação e do método de resfriamento; operação acima de conjugado nominal do motor pode ser requerida para acelerar, desacelerar e atender picos de carga. Operação acima da corrente nominal aumenta o aquecimento do motor. Isso pode requerer uma classe de isolação mais elevada, um motor sobredimensionado ou a avaliação do regime de serviço para determinar se o motor possui reserva térmica suficiente para a aplicação (ver regime de serviço S10 da NBR 17094-1).
A frenagem por injeção de corrente contínua dinâmica ou regenerativa pode ser requerida para reduzir a rotação do motor. Independentemente de o motor estar fornecendo conjugado para acionar a carga, estar gerando potência reversa para o conversor de frequência devido a estar sendo acionado pela carga, ou estar fornecendo conjugado de frenagem durante a desaceleração pela aplicação de corrente contínua nos enrolamentos, o aquecimento do motor ocorre de forma aproximadamente proporcional ao quadrado da corrente enquanto aplicada. Este aquecimento deve ser incluído na análise do regime de serviço.
Além disso, os conjugados transitórios impostos no eixo pela frenagem devem ser controlados de forma que não cause danos. A IEC 61800-6 fornece informações sobre regime de carga e determinação de corrente para todo o PDS. As cargas de alto impacto são um caso especial de regime e são encontradas em certas aplicações com conjugado intermitente (por exemplo, regime de serviço S6 da NBR 17094-1).
Nestas aplicações, a carga é aplicada ou removida do motor muito rapidamente. É também possível para este conjugado de carga ser positivo (contrário à direção de rotação do motor) ou negativo (na mesma direção de rotação do motor). A carga de impacto provoca um rápido aumento ou redução na demanda de corrente do conversor de frequência. Se o conjugado for negativo, o motor pode gerar corrente de volta para o conversor de frequência. Estas correntes transitórias estressam os enrolamentos do estator e sua amplitude depende das características da carga e do dimensionamento do conversor de frequência e do motor.
O nível de vibração produzido por um motor elétrico alimentado por conversor de frequência é influenciado pelos seguintes fatores: o projeto eletromagnético do motor; a estrutura do motor, particularmente a montagem da carcaça; a montagem do motor; a rigidez do eixo; a rigidez do acoplamento entre o eixo do motor e a carga acionada; e a forma de onda de saída do conversor de frequência. Desde que o conversor de frequência tenha características de saída adequadas e também que seja dada a devida atenção às características mecânicas do motor elétrico e à sua montagem, serão obtidos níveis de vibração semelhantes aos produzidos com alimentação senoidal.
Assim, para motores alimentados por conversores de frequência PWM, não há necessidade de estabelecimento de níveis de vibração diferentes dos estabelecidos para alimentação senoidal, conforme a NBR IEC 60034-14 que fornece limites de vibração para máquinas elétricas ensaiadas em base elástica ou em base rígida. Os resultados das medições de vibração realizadas conforme a NBR IEC 60034-14 são uma indicação da qualidade do motor. Quando o motor for montado em uma estrutura ou acoplado a um equipamento acionado, o nível de vibração pode ser diferente.
O acoplamento de um motor elétrico a uma carga acionada dá origem a muitas frequências naturais de ressonância e, se a aplicação requerer que o motor opere em uma ampla faixa de rotação, pode ser impossível evitar todas essas frequências. Se ocorrerem problemas, às vezes é possível programar o conversor de frequência de modo que as faixas de frequência que estão excitando as ressonâncias mecânicas sejam evitadas. Uma vez que muitos fatores que influenciam o nível de vibração são devidos ao sistema completo, não é possível resolver todos os problemas de vibração considerando apenas o projeto do motor elétrico.

Hayrton Rodrigues do Prado Filho
Artigo atualizado em 13/08/2025 02:55.